
|
|
This thesis addresses path planning in changeable environments. In contrast to traditional path planning that deals with static environments, in changeable environments objects are allowed to change their configurations over time. In many cases, path planning algorithms must facilitate quick answers to queries in order to be useful. For example, an opponent in a training simulation needs to respond to the actions of the user without any significant delay. To achieve such performance, path planning methods usually use a preprocessing phase in which the environment is explored. As much computation time as possible is moved to this preprocessing phase such that at query time only little time is needed to solve an actual path planning query. This approach has led to many successful methods that are applicable to a broad range of problems.
|
|
|
My publications on the topic of motion and navigation. These papers cover the following topics: randomized path planning, changeable environments, compliant motions and robust roadmaps.
|
|
|
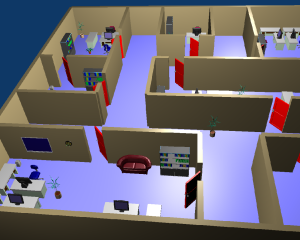
Callisto is a library that supports researchers with 3D visualisation and collision checking.
Callisto sets up a 3D visualisation environment, interfaces with a collision checker, creates simple animations etc.
It allows users to concentrate on their research instead of wasting lots of time creating their software framework.
Callisto has been successfully used for many years in many areas of robots research especially research in randomized navigation algorithms.
|
|
|
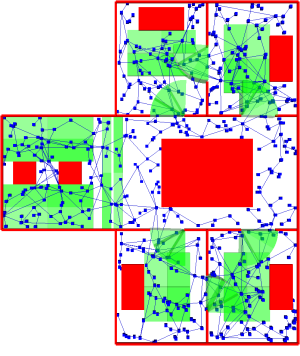
Atlas is a graph library originally created to support development of roadmap based planning algorithms. It is compiled as a Windows DLL and supports Dijkstra, A* and all-pairs shortest path.
|
|
|
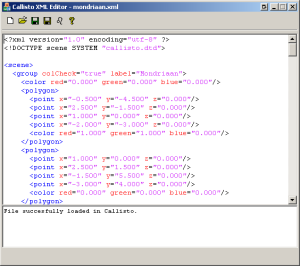
The Callisto XML Editor is a simple editor specifically designed to ease the creation of simple XML scenes for Callisto.
It has the following features:
- Syntax highlighting.
- Previewing the scene in Callisto with one click.
- Error reporting.
|
|
|
|
|